Nombre de messages : 46170 Age : 56 Localisation : Quaregnon (Bel) Date d'inscription : 27/06/2007
Sujet: Re: Comment seront nos futurs chasseurs de mines ? (Part. 1) Ven 16 Juin 2017 - 21:16
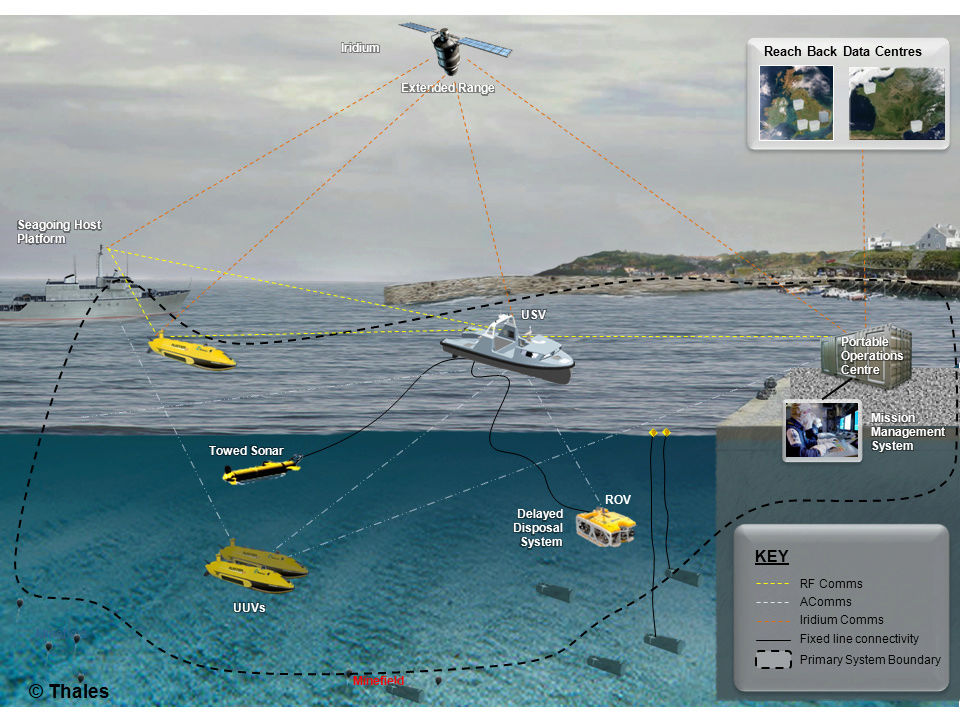
Si pour le drone de surface (USV) la communication avec le 'mother ship' se fait par radio fréquence (RF Comms), ça parait beaucoup plus difficile pour communiquer avec un drone sous-marin (UUV) une fois celui-ci en plongée ! Sur le dessin du dessus il est indiqué que la communication avec le 'mother ship' se fait en (A Comms) ce qui je suppose veut dire "accoustic communication" !? Je ne vois que ça puisqu'on est sous l'eau ! Et, franchement, ça doit pas être simple
D'après mes recherches, pour l'instant, un UUV serait surtout un drone sous-marin autonome, c'est à dire qu'une fois en plongée celui-ci ne serait plus en contact avec le 'mother ship' mais il serait autonome suivant la programmation qu'il aurait reçu (du mother ship) avant de plonger !?
Je vais essayer de trouver de la docu (même en anglais) là-dessus mais comme c'est un système récent, il n'y en a pas des masses !
_________________ olivier
Les plus grands ne sont pas ceux qui ne tombent jamais, mais ceux qui se relèvent toujours !
Nombre de messages : 46170 Age : 56 Localisation : Quaregnon (Bel) Date d'inscription : 27/06/2007
Sujet: communication entre drones aériens UAV et sous-marins UUV Sam 17 Juin 2017 - 8:50
olivier a écrit:
Si pour le drone de surface (USV) la communication avec le 'mother ship' se fait par radio fréquence (RF Comms), ça parait beaucoup plus difficile pour communiquer avec un drone sous-marin (UUV) une fois celui-ci en plongée ! Sur le dessin du dessus il est indiqué que la communication avec le 'mother ship' se fait en (A Comms) ce qui je suppose veut dire "accoustic communication" !? Je ne vois que ça puisqu'on est sous l'eau ! Et, franchement, ça doit pas être simple
D'après mes recherches, pour l'instant, un UUV serait surtout un drone sous-marin autonome, c'est à dire qu'une fois en plongée celui-ci ne serait plus en contact avec le 'mother ship' mais il serait autonome suivant la programmation qu'il aurait reçu (du mother ship) avant de plonger !?
Je vais essayer de trouver de la docu (même en anglais) là-dessus mais comme c'est un système récent, il n'y en a pas des masses !
Voilà, j'ai trouvé un communiqué de presse du groupe ECA (qui était présent avec ces drones à Zeebrugge) publié en octobre 2016 (il y a moins d'un an) au salon Euronaval au sujet de la communication sous-marine entre le bateau mère et les drones sous-marin en plongée à plusieurs km de distance, et c'est bien comme je le pensais, c'est loin d'être facile ! Et donc, ECA propose d'utiliser un drone aérien équipé d'un sonar trempé pour communiquer au plus près avec les drones sous-marin !
Voici le communiqué de presse et les explications :
Citation :
ECA Group lance le DRONECOM - un réseau coopératif de communication entre les drones aériens et sous-marins (5.10.2016)
Les drones sous-marins (UUV) sont employés pour effectuer des missions de reconnaissance et de surveillance du fond marin, par exemple la recherche de mines sous-marines, en mode individuel (20h d’endurance et couverture de 2km2/h) ou en mode « meute » (en flotille) permettant d’augmenter sensiblement la couverture de la zone à explorer ainsi que le rendement de la mission (4 drones peuvent couvrir 160km2 par mission).
Le challenge opérationnel est de maintenir un lien de communication haut débit avec les drones sous-marins afin de pouvoir interpréter les données des capteurs et le cas échéant modifier la mission. Si la transmission des données brutes en temps réel n’est plus toujours nécessaire, il reste néanmoins un besoin opérationnel pour la transmission périodique d’échantillons représentatifs de données capteur, permettant leur analyse par un opérateur et le déclenchement éventuel d'autres missions (par exemple la destruction de mines sous-marines).
Or ceci pose un problème délicat lorsque les drones sous-marins sont répartis sur une grande zone qui peut elle-même être distante du poste de commandement de plus de 100km, car les communications sous-marines actuelles ont des performances très aléatoires sur des grandes portées horizontales, notamment par petits fonds. Il faut donc s’attendre à des débits très faibles, de l’ordre de quelques dizaines de bits/s qui ne permettent pas l’interprétation suffisamment rapide des données des capteurs. Ceci est une limitation sévère à l’emploi de flottilles de drones sous-marins.
L’invention du Groupe ECA se propose de développer un sonar trempé de communications sous-marines qui est déployé par un système UAV / drone aérien IT180.
L’utilisation de sonars trempés est une pratique courante pour la détection de sous-marins ennemis (véhicule non coopératif) à partir d’aéronefs pour la détection sous-marine, mais il s’agit ici d'une utilisation tout à fait différente, car d'abord les véhicules aériens et sous-marins forment un réseau coopératif, ensuite le sonar de communications opère à des fréquences bien plus élevées et par conséquent il est d’un poids (<10kg) et d’une consommation bien plus faible. On peut donc envisager son installation sur un petit drone aérien.
Un tel sonar trempé est le seul moyen possible pour avoir un lien de communication acoustique sous-marine à haut débit entre le drone sous-marin et une plateforme aéroportée. En effet, à cause de la différence d’impédance acoustique entre la mer et l’atmosphère, la plus grande partie de l’énergie acoustique émise par un émetteur à bord du drone sous-marin n’atteindra jamais un récepteur situé dans l’air. Pour maximiser l’énergie reçue, et ainsi le débit, il faut obligatoirement immerger aussi le récepteur, ce qui conduit à le tremper lorsque celui-ci est déployé à partir d’une plateforme aérienne.
Ce sonar trempé est avantageusement déployé à partir d’un drone aérien à voilure tournante, l’UAV IT180, qui peut se maintenir à la verticale du drone sous-marin, se déplaçant à une vitesse typique de l’ordre de 3 noeuds. Les communications sous-marines s’effectuent donc dans d’excellentes conditions car on minimise la distance de communication sous-marine, égale à l’immersion du véhicule et typiquement de quelques dizaines de mètres seulement par petits fonds. Dans un tel canal vertical et à des portées aussi faibles il est connu d’obtenir des débits de l’ordre du Mbit/s avec de l’acoustique haute fréquence. De plus, lorsque l’état de surface le permet, il est possible pour l’UAV d’appeler le drone sous-marin à la surface, et établir avec lui un lien de communication WiFi, à bien plus haut débit.
La position du drone aérien est connue à tout instant avec une très grande précision par GPS alors que celle du drone sous-marin, basé sur un système de navigation inertielle, dérive avec le temps et doit être recalé de manière périodique.
L’emploi du sonar trempé permet d’effectuer un tel recalage en position selon différentes méthodes de localisation acoustique connues dite de base ultracourte, ou bien de base ultracourte inversée. En d'autres termes les deux véhicules coopèrent pour améliorer la précision de positionnement du véhicule sous-marin.
On exploite aussi la possibilité du drone aérien de se déplacer très rapidement (par rapport à un véhicule de surface ou sous-marin) d’un point à l’autre et ainsi de communiquer séquentiellement avec tous les membres d’une flottille de drones sous-marins. Un tel moyen de communication est bien plus efficace qu’un réseau étendu de communication sous-marine qui ne permettrait qu’un débit très faible ou bien nécessiterait un nombre complètement irréaliste de répéteurs sous-marins si l’on souhaite maintenir le débit.
Par ailleurs il est connu d’utiliser les drones aériens comme relai de communication aérienne permettant de communiquer au-delà de l’horizon. Le sonar trempé permet donc d’intégrer les drones sous-marins dans un tel réseau de communications.
Dans une extension évidente de l’invention, on utilise le sonar trempé pour communiquer avec tous les types connus de plateforme sous-marine, incluant les véhicules habités, les planeurs, les bouées à immersion variable, et les stations fixes au fond de la mer.
La présentation de cette innovation aux clients potentiels (marines, océanographes, hydrographes, sociétés de service off-shore) se fera dans les mois qui suivent, en commençant par le salon Euronaval (stand H73-F70).
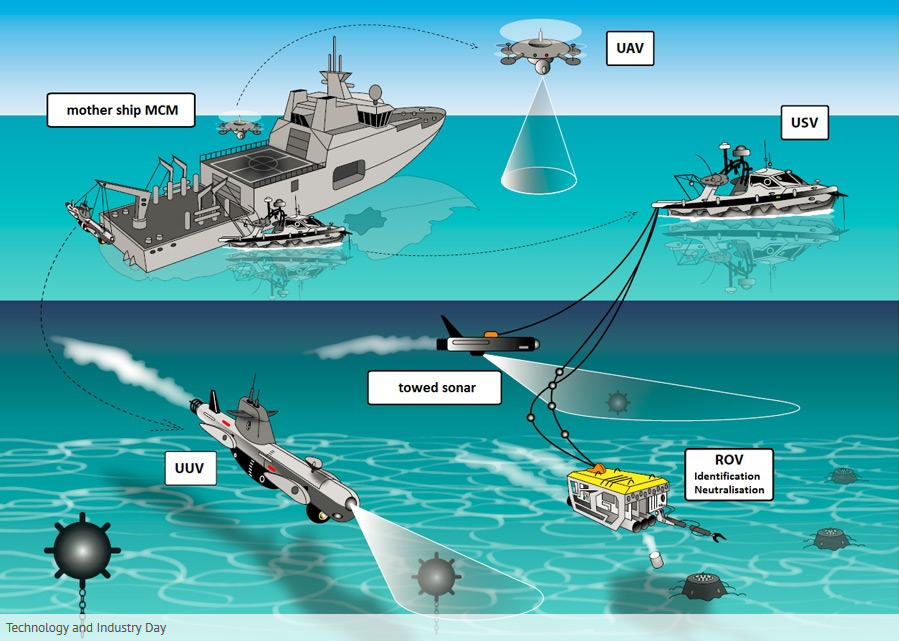
Voilà probablement pourquoi un drone aérien (UAV - Unmanned Aerial Vehicle) était présenté sur le dessin montrant à quoi pourrait ressembler les futures navires MCM
_________________ olivier
Les plus grands ne sont pas ceux qui ne tombent jamais, mais ceux qui se relèvent toujours !
Nombre de messages : 46170 Age : 56 Localisation : Quaregnon (Bel) Date d'inscription : 27/06/2007
Sujet: Re: Comment seront nos futurs chasseurs de mines ? (Part. 1) Sam 17 Juin 2017 - 13:23
J'ai compris pourquoi il est parti là-bas, en fait, le SEAGULL 301 du groupe israélien "Elbit Systems" est construit en Hollande par le chantier de Haas à Maassluis
_________________ olivier
Les plus grands ne sont pas ceux qui ne tombent jamais, mais ceux qui se relèvent toujours !
Nombre de messages : 1613 Age : 59 Localisation : Dinant Date d'inscription : 19/11/2007
Sujet: Re: Comment seront nos futurs chasseurs de mines ? (Part. 1) Sam 17 Juin 2017 - 20:24
olivier a écrit:
shrek, les tests MCM continuent, tu dois retourner d'urgence à Zeebrugge pour nous tenir informé
C'était journée pêche aujourd'hui
Désolé, mais je ne travaille que de 8H à 15H30 et jamais le week-end non plus. Et dans peu de temps, il n'y aura même plus aucun militaire de garde aux postes de garde, ce sera un truc comme Securitas qui sera de faction.
De par ta faute Olivier, cette semaine et avec tout le bazar, j'ai fait presque 3 heures en trop que je vais devoir récupérer la semaine prochaine en terminant plus tôt.
Elle n'est pas belle la vie ?
René Amiral
Nombre de messages : 7390 Age : 65 Localisation : Trazegnies Date d'inscription : 23/12/2010
Sujet: Re: Comment seront nos futurs chasseurs de mines ? (Part. 1) Sam 17 Juin 2017 - 22:38
shrek a écrit:
olivier a écrit:
shrek, les tests MCM continuent, tu dois retourner d'urgence à Zeebrugge pour nous tenir informé
C'était journée pêche aujourd'hui
Désolé, mais je ne travaille que de 8H à 15H30 et jamais le week-end non plus. Et dans peu de temps, il n'y aura même plus aucun militaire de garde aux postes de garde, ce sera un truc comme Securitas qui sera de faction.
De par ta faute Olivier, cette semaine et avec tout le bazar, j'ai fait presque 3 heures en trop que je vais devoir récupérer la semaine prochaine en terminant plus tôt.
Elle n'est pas belle la vie ?
Rentré plus tôt ! PUFFF, y a plus motivation
olivier Admin
Nombre de messages : 46170 Age : 56 Localisation : Quaregnon (Bel) Date d'inscription : 27/06/2007
Sujet: Re: Comment seront nos futurs chasseurs de mines ? (Part. 1) Dim 18 Juin 2017 - 18:36
shrek a écrit:
De par ta faute Olivier, cette semaine et avec tout le bazar, j'ai fait presque 3 heures en trop que je vais devoir récupérer la semaine prochaine en terminant plus tôt.
Elle n'est pas belle la vie ?
Ah oui
_________________ olivier
Les plus grands ne sont pas ceux qui ne tombent jamais, mais ceux qui se relèvent toujours !















 shrek, les tests MCM continuent, tu dois retourner d'urgence à Zeebrugge pour nous tenir informé
shrek, les tests MCM continuent, tu dois retourner d'urgence à Zeebrugge pour nous tenir informé 










